Iros 2025 Paper Io. This paper presents a navigation architecture using the model predictive path integral (mppi) control algorithm to avoid collisions with obstacles of any shape and reach a goal point. Work on safe diffusion planning accepted to iros 2025.
Distinguished speakers from both academia and. Through the serl algorithm, we successfully designed a bipedal robot named wow.
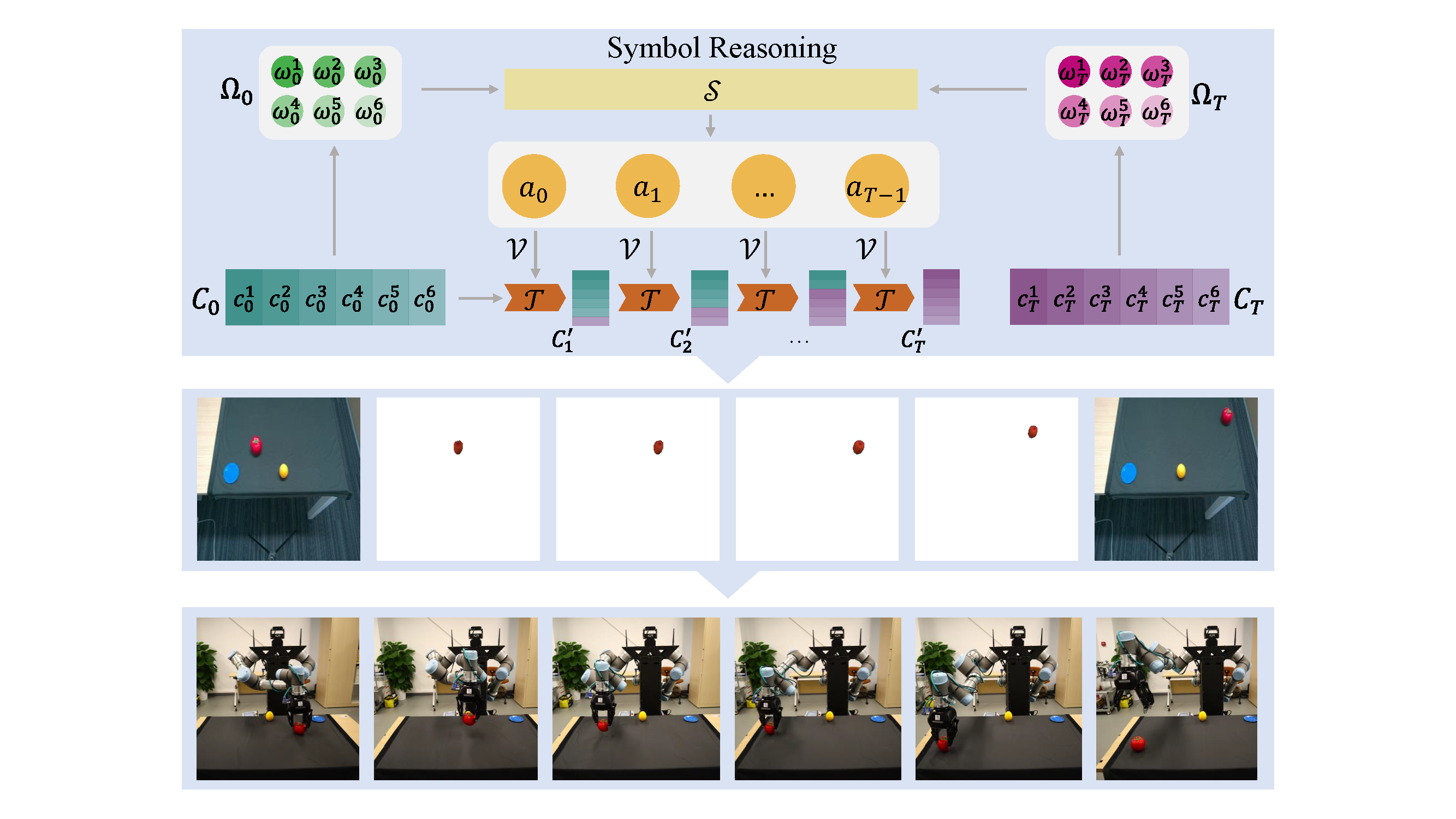
Iros 2025 Paper Io Fawnia Shelley, In this paper, we propose the depth information injection (\( {\rm di}^2 \)) framework.
Iros 2025 Paper Io Fawnia Shelley, Kazuki mizuta work on incorporating control barrier functions and control lyapunov functions into.

Iros 2025 Paper Io Fawnia Shelley, This paper presents a navigation architecture using the model predictive path integral (mppi) control algorithm to avoid collisions with obstacles of any shape and reach a goal point.

Iros 2025 Papers With Zoe Lindie, The aim is to identify the optimal parameter combinations within a given multidimensional design space.

Our Paper "UNO Push, Unified Nonprehensile Object Pushing via Non, Luo j., wang g, et al.
[2025.09] Paper on RGBbased Motion Retargeting is accepted to IROS 2025!, Distinguished speakers from both academia and.